工业jrs英超直播吧_jrs直播_极速体育nba直播吧坐标系介绍
坐标系:为确定jrs英超直播吧_jrs直播_极速体育nba直播吧的位置和姿态而在jrs英超直播吧_jrs直播_极速体育nba直播吧或空间上进行的位置指标系统。
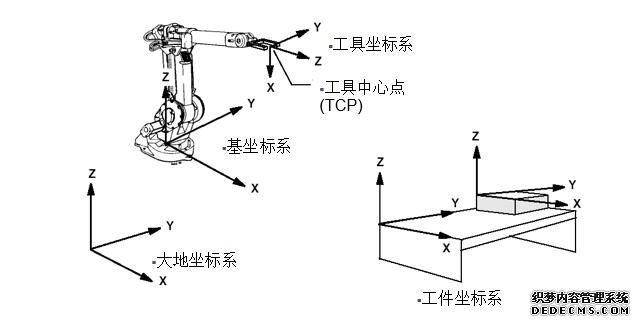
坐标系包含:
基坐标系(Base Coordinate System)
大地坐标系(World Coordinate System)
工具坐标系(Tool Coordinate System)
工件坐标系(Work Object Coordinate System)
工具坐标系
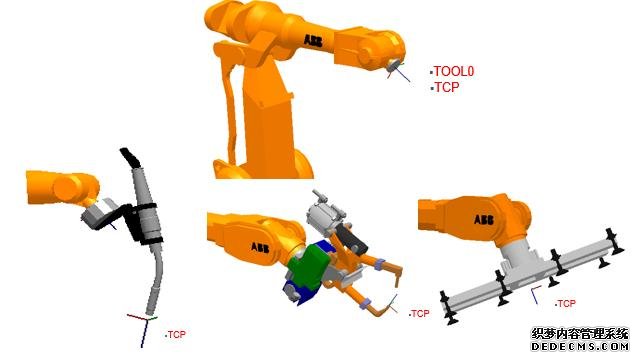
?jrs英超直播吧_jrs直播_极速体育nba直播吧工具座标系是由工具中心点 TCP 与座标方位组成。
?jrs英超直播吧_jrs直播_极速体育nba直播吧联动运行时,TCP 是必需的。
1) Reorient 重定位运动(姿态运动)jrs英超直播吧_jrs直播_极速体育nba直播吧 TCP 位置不变,jrs英超直播吧_jrs直播_极速体育nba直播吧工具沿座标轴转动,改变姿态。
2) Linear 线性运动jrs英超直播吧_jrs直播_极速体育nba直播吧工具姿态不变,jrs英超直播吧_jrs直播_极速体育nba直播吧 TCP 沿座标轴线性移动。
?jrs英超直播吧_jrs直播_极速体育nba直播吧程序支持多个 TCP,可以根据当前工作状态进行变换。
?jrs英超直播吧_jrs直播_极速体育nba直播吧工具被更换,重新定义 TCP 后,可以不更改程序,直接运行。
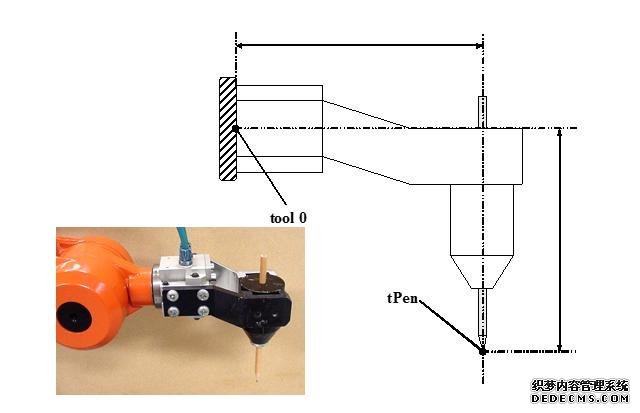
1.1.定义工具坐标系的方法:
N(N=4)点法/TCP法-jrs英超直播吧_jrs直播_极速体育nba直播吧 TCP 通过N种不同姿态同某定点相碰,得出多组解,通过计算得出当前 TCP 与jrs英超直播吧_jrs直播_极速体育nba直播吧手腕中心点 ( tool0 ) 相应位置,座标系方向与 tool0 一致。
TCPZ法-在N点法基础上,Z点与定点连线为座标系 Z 方向。
TCPX,Z法-在N点法基础上,X点与定点连线为座标系 X 方向,Z点与定点连线为座标系 Z 方向。

2. 工件坐标系
?jrs英超直播吧_jrs直播_极速体育nba直播吧工件座标系是由工件原点与座标方位组成。
?jrs英超直播吧_jrs直播_极速体育nba直播吧程序支持多个 Wobj,可以根据当前工作状态进行变换。
?外部夹具被更换,重新定义 Wobj 后,可以不更改程序,直接运行。
?通过重新定义 Wobj,可以简便的完成一个程序适合多台jrs英超直播吧_jrs直播_极速体育nba直播吧。
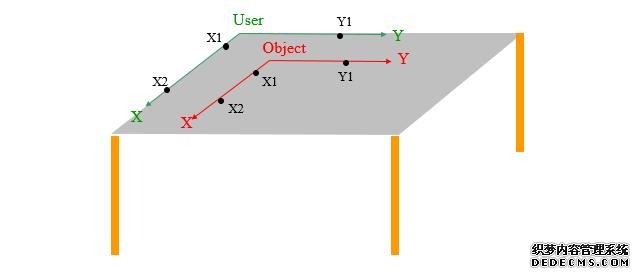
2.1.定义工件坐标系的方法:
?三点法-点 X1 与 点 X2 连线组成 X 轴,通过点 Y1 向 X 轴作的垂直线,为 Y 轴。