PID控制算法基础与原理解析
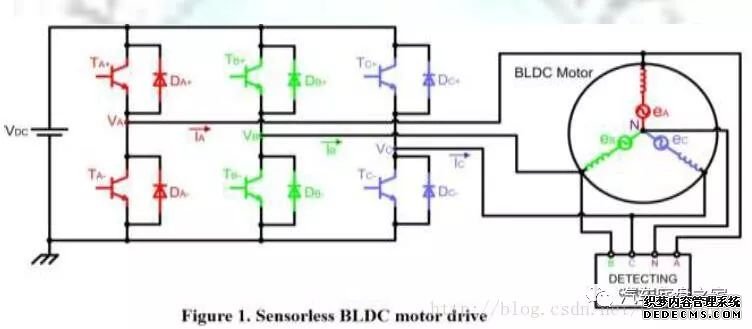
电流环PID调节器:
PID算法基础
PID原理解析
PID算法基础
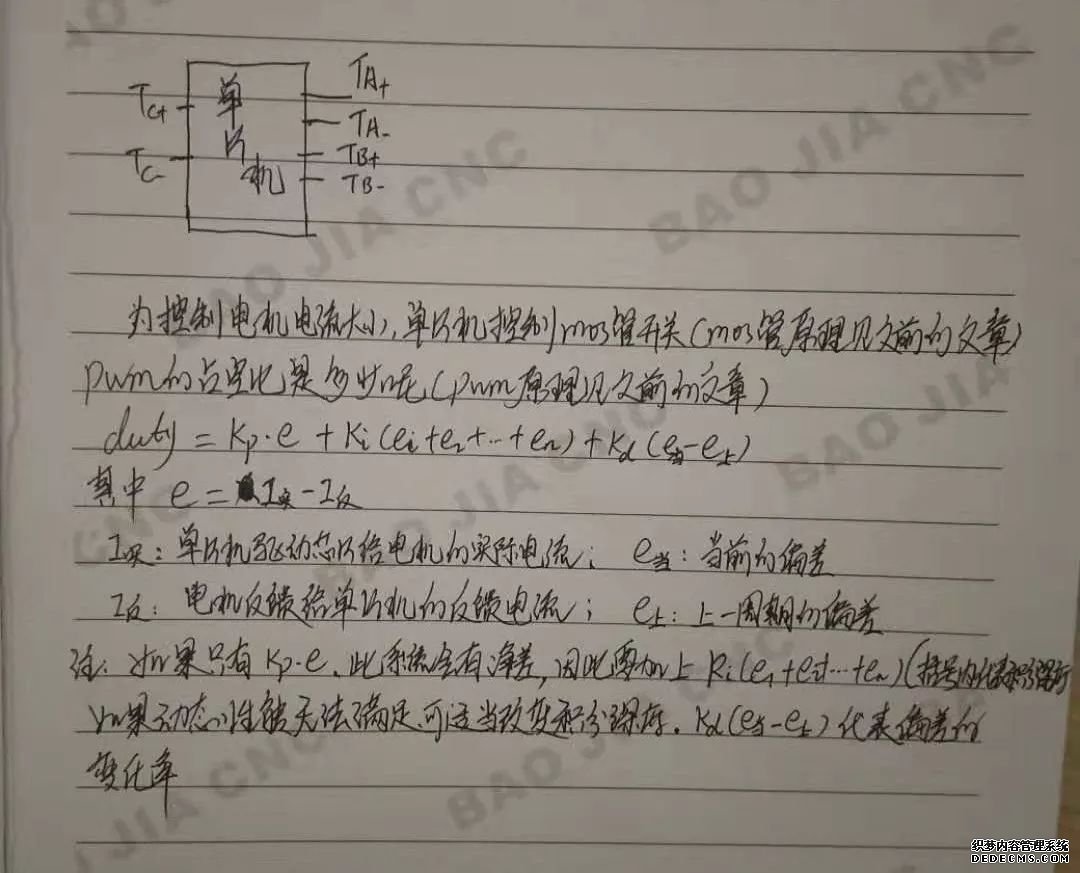
在模拟调节系统中,PID算法表达式为:

式1中,u(t)—调节器的输出信号; kp—调节器的比例系数;
e(t)—调节器输入的偏差信号,它等于测量值与给定值之差;
Ti—调节器的积分时间常数; Td—调节器的微分时间常数。
微处理器是一种采样控制,需对式1进行离散化处理,用数学形式的差分方程式代替连续系统的微分方程,积分可用求和表示,而微分可用后向差分表示。离散的PID表达式:

式中,T—采样周期,必须使足够小,才能保证系统精度;
e(k)—第k次采样的偏差值;
e(k-1)—第k-1次采样时的偏差值;k—采样序号,k=0,1,2……;
u(k)—第k次采样调节器的输出。
PID原理解析
标签

